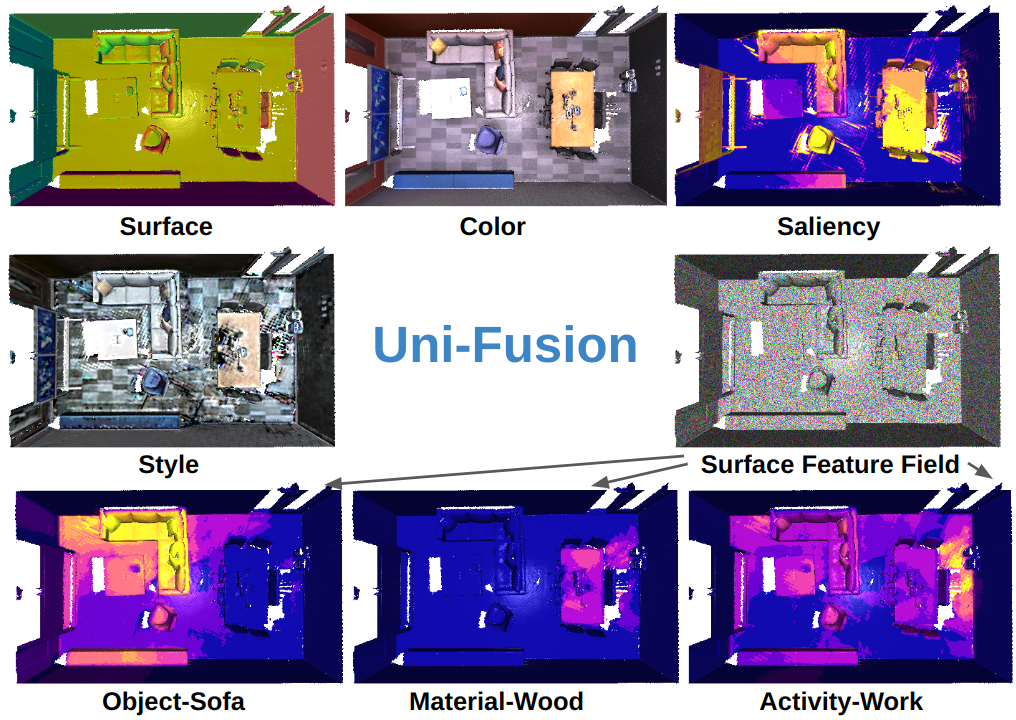
All you need, in one Uni. :D
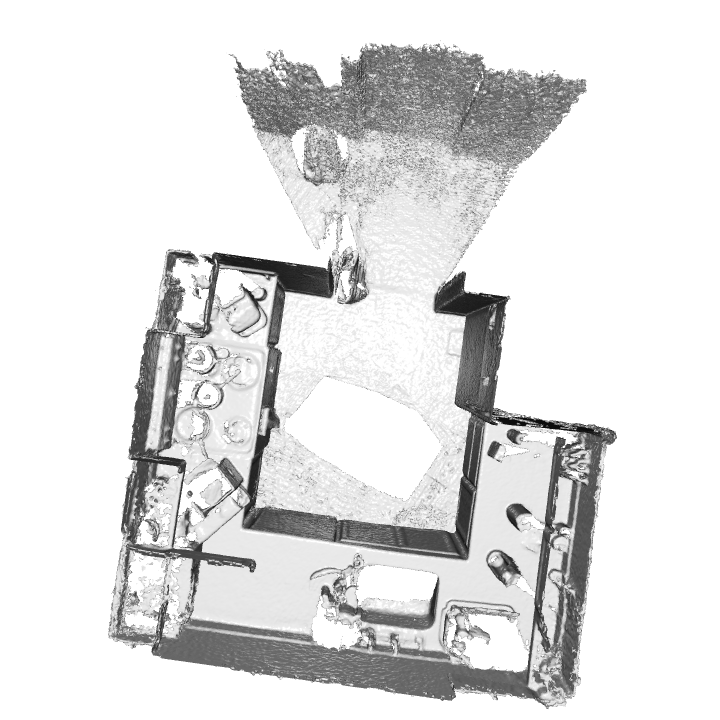
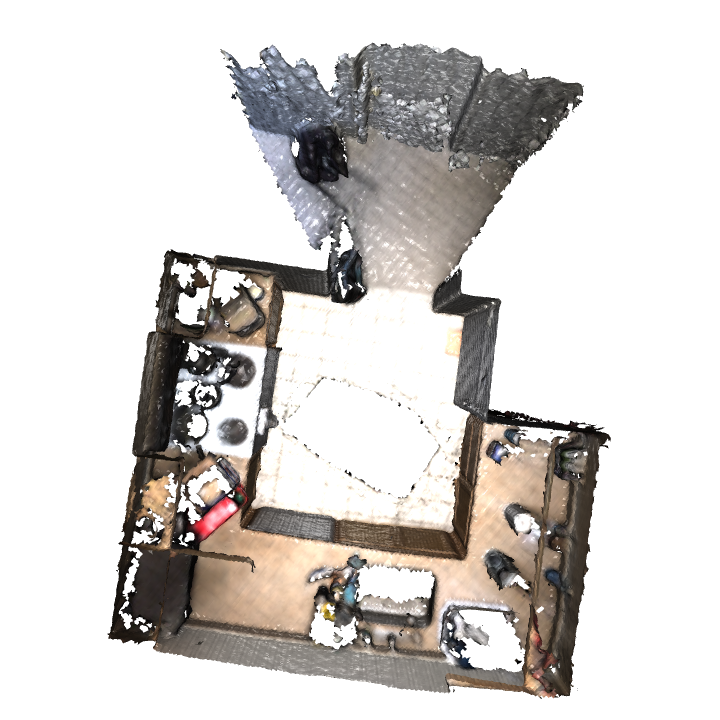
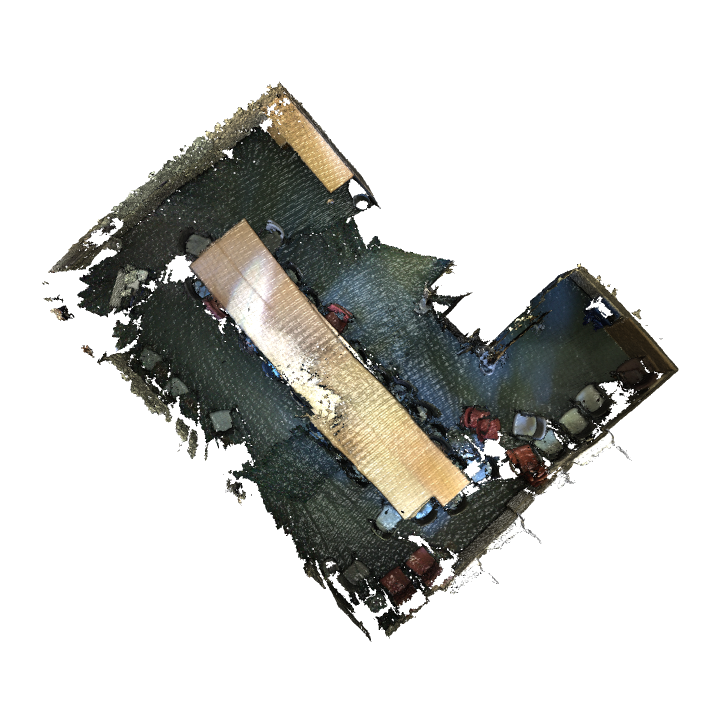
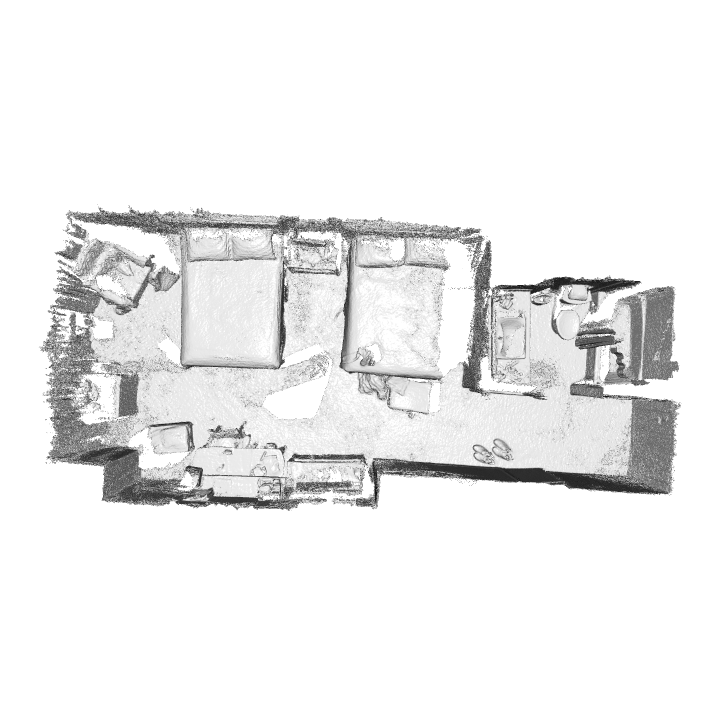
We cut the ceiling for better visualization.
Please zoom in the webpage and wipe the slidebar, BNV-Fusion's results contain lots of small particles in the wall.
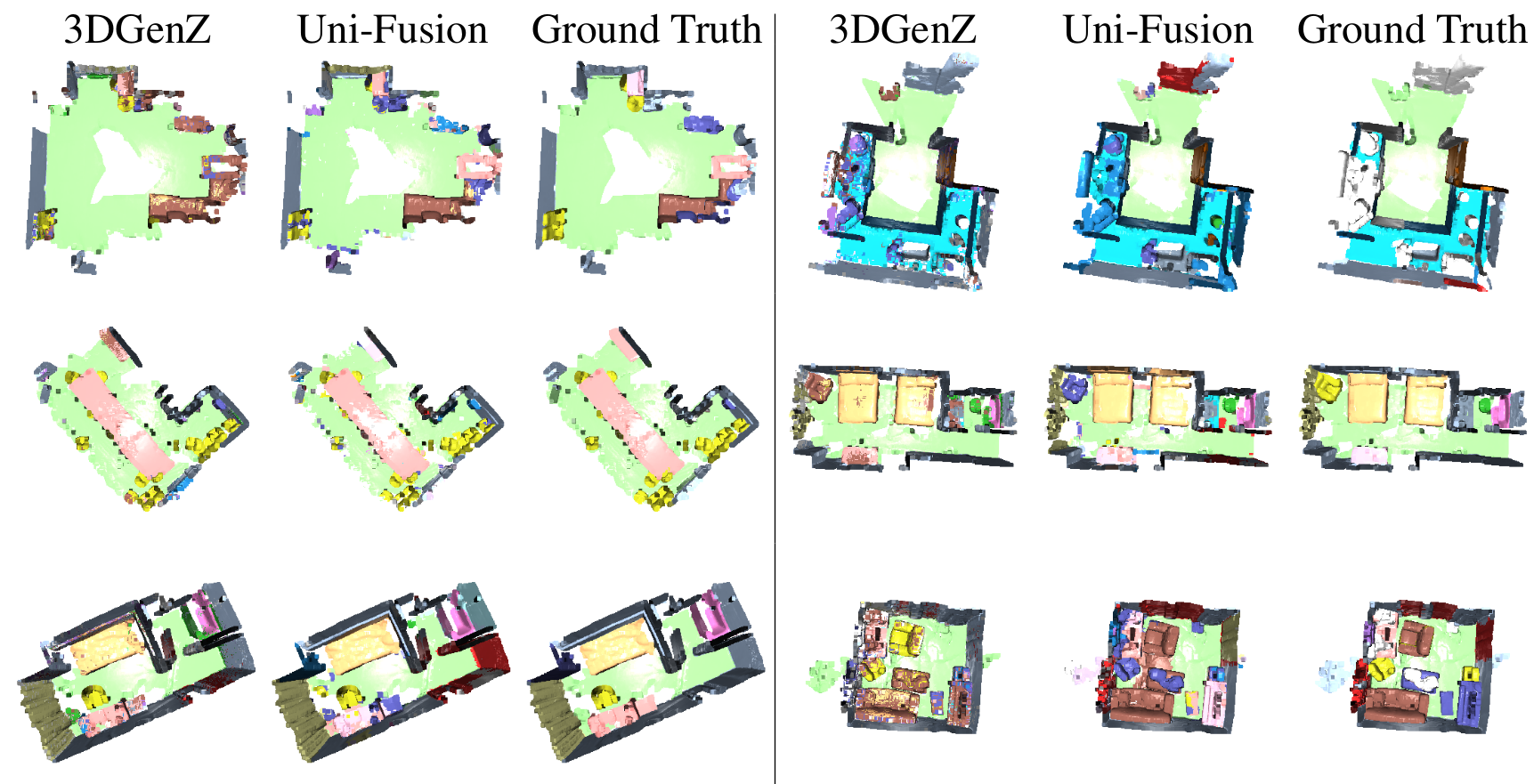
Fair continues mapping baseline NICE-SLAM does not reconstruct fine details. While Uni-Fusion is able to construct high quality result. We also compare with NeRF in paper to show the high postential but not demonstrate it here, as NeRF is task-specific to view-synthesis, which is not a fair baseline.
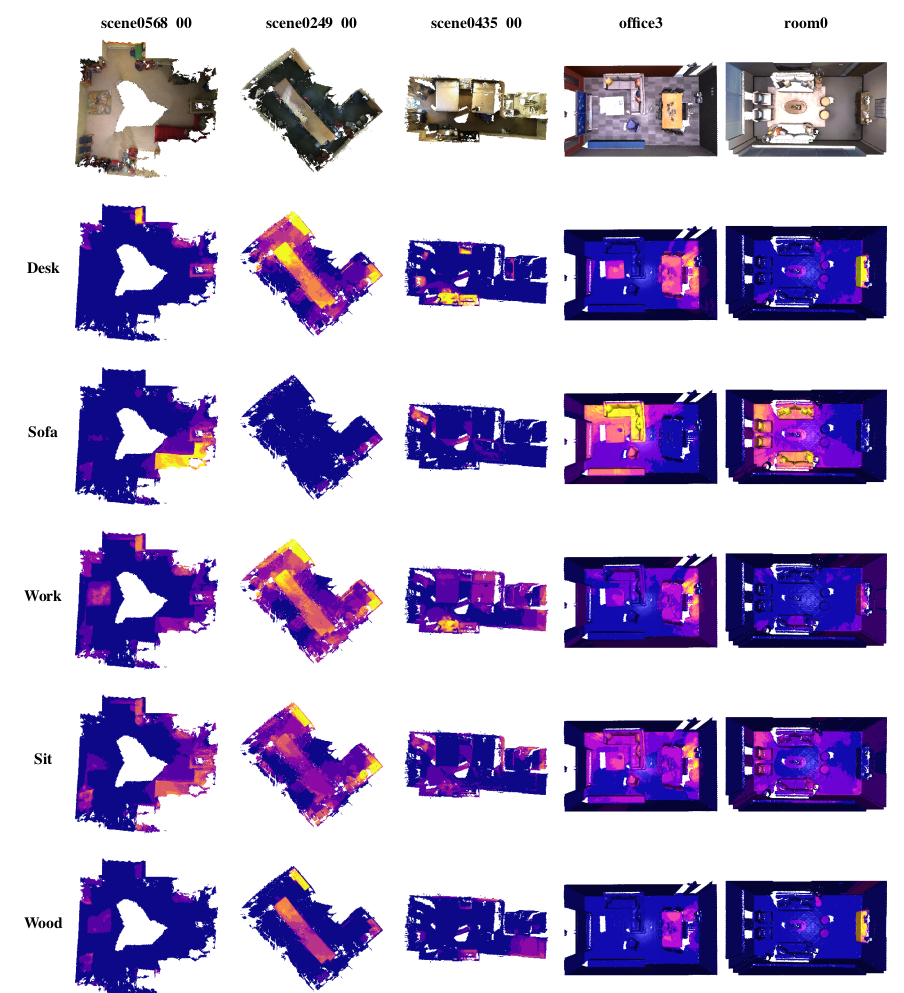
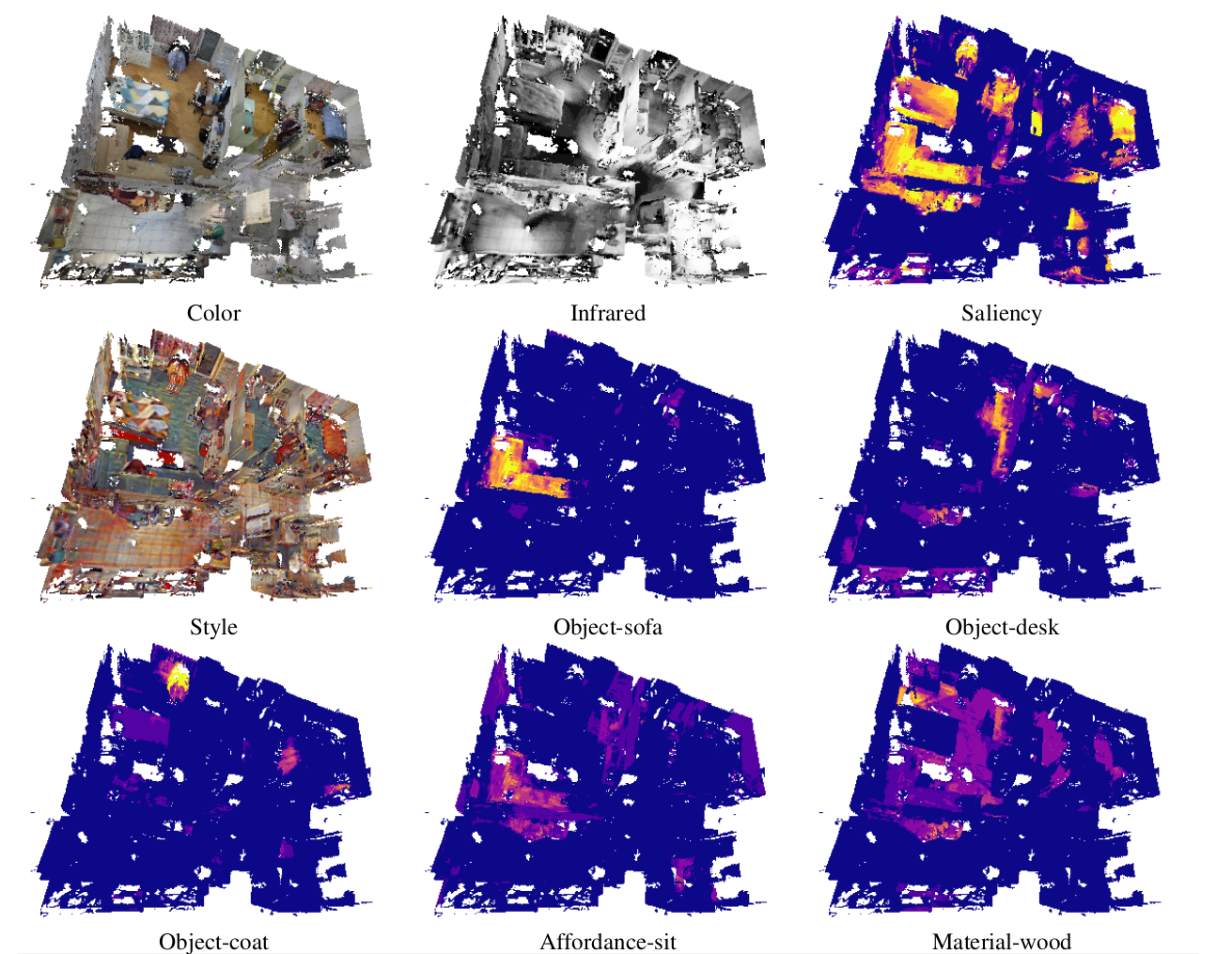
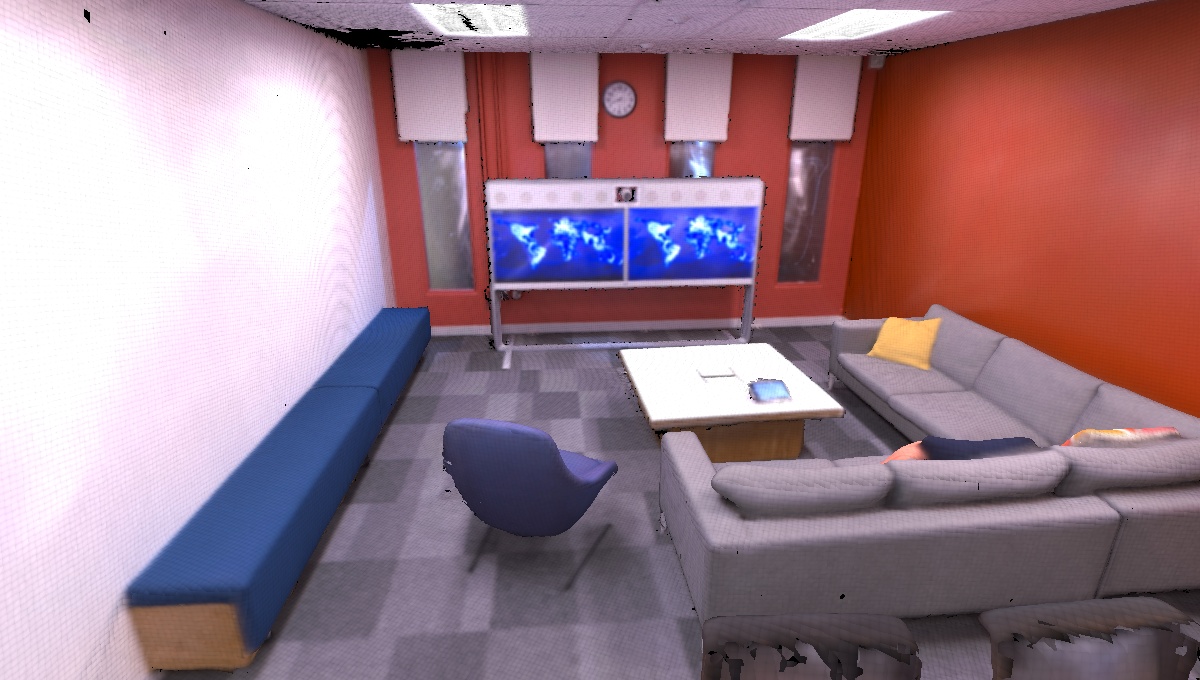
Uni-Fusion construct Surface Field of CLIP embedding.