
Yijun Yuan (元祎君)
I’m now a PostDoc in MARS lab, led by Prof. Dr. Hang Zhao, in Tsinghua IIIS. I received my PhD (Dr. rer. nat.) from Würzburg University. My dear PhD supervisers are Prof. Dr. Andreas Nüchter, Prof. Dr. Radu Timofte and Prof. Dr. Sören Schwertfeger. Before that I received my Bachelor’s and Master’s Degree from dear ShanghaiTech University. I’m interested in Robotics. My current researches are mainly related to dense SLAM.
CV | ResearchGate | codes
News
Recent researches
 | Yijun Yuan, Zhuoguang Chen, Kenan Li, Weibang Wang, Hang Zhao paper | website | codeWe present SLAM-Former, a novel neural approach that integrates full SLAM capabilities into a single transformer. |
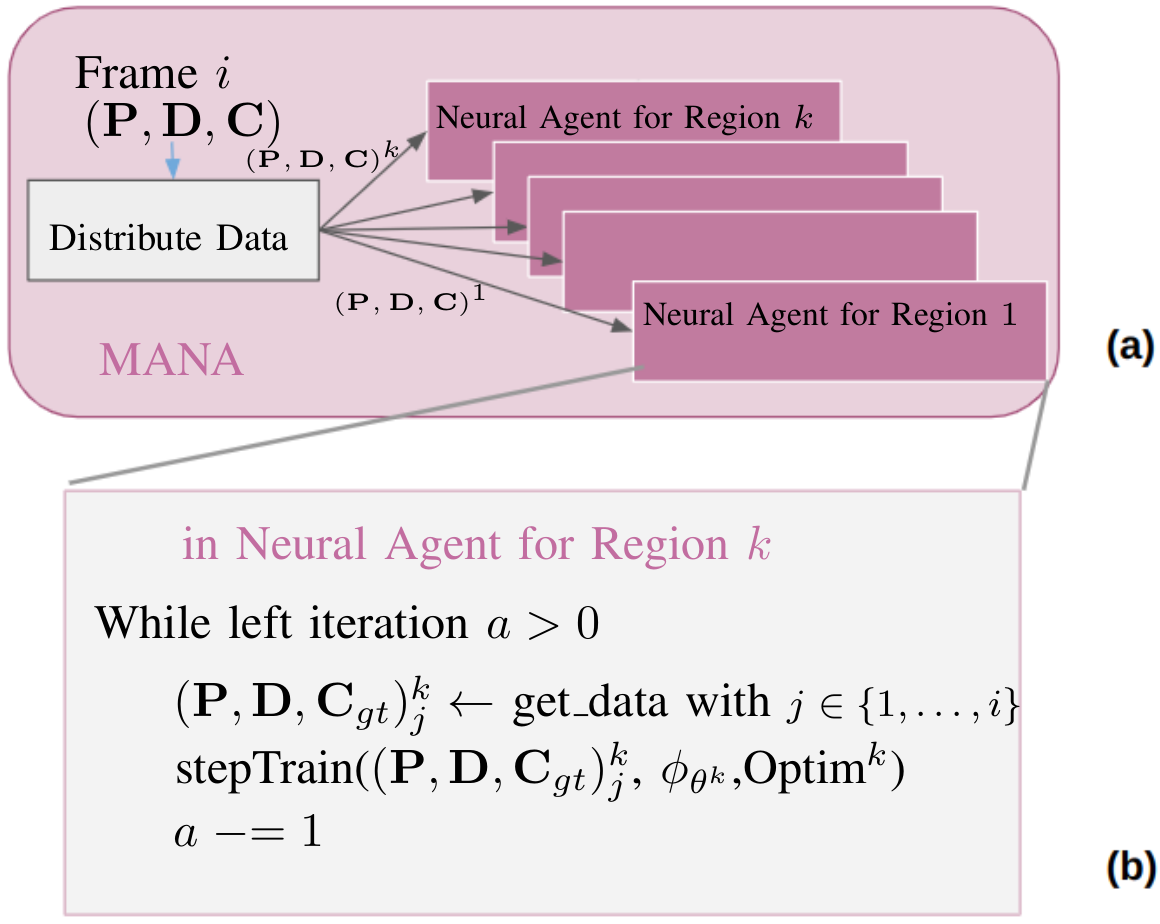
 | Yijun Yuan, Michael Bleier, Andreas Nuchter IEEE Transactions on Robotics (T-RO), 2025 paper | website | codeFollowing the structure of a “Factory”, we introduce workflow-centric framework that provides “assembly lines” for a wide range of applications, to achieve high flexibility, adaptability and production diversification. |
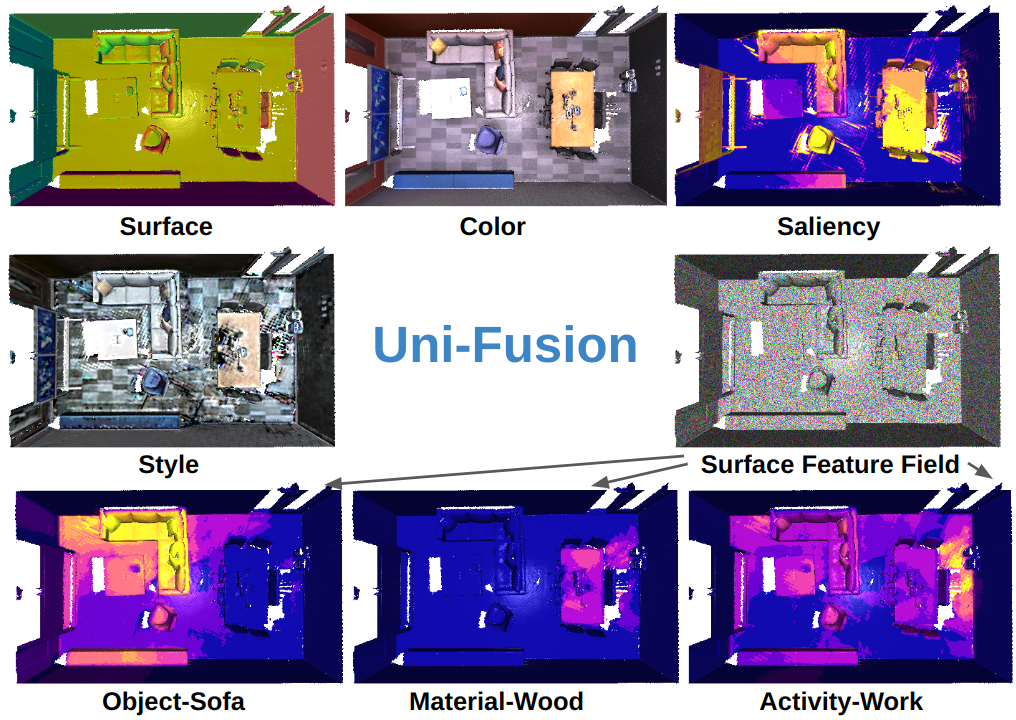 | Yijun Yuan, Andreas Nuchter IEEE Transactions on Robotics (T-RO), 2024 website | paper | codeThe first universal continuous mapping framework for surfaces, surface properties (color, infrared, style, saliency, etc.) and more (latent features in CLIP embedding space, etc.). |
 | Yijun Yuan, Andreas Nuchter IEEE Robotics and Automation Letters (RAL), 2023 website | paper | codeNSLF-OL explores more fully decoupling the representation of geometry and color. Working alongside real-time surface reconstruction, NSLF-OL focuses on surface field to provide efficient online modeling of light. |
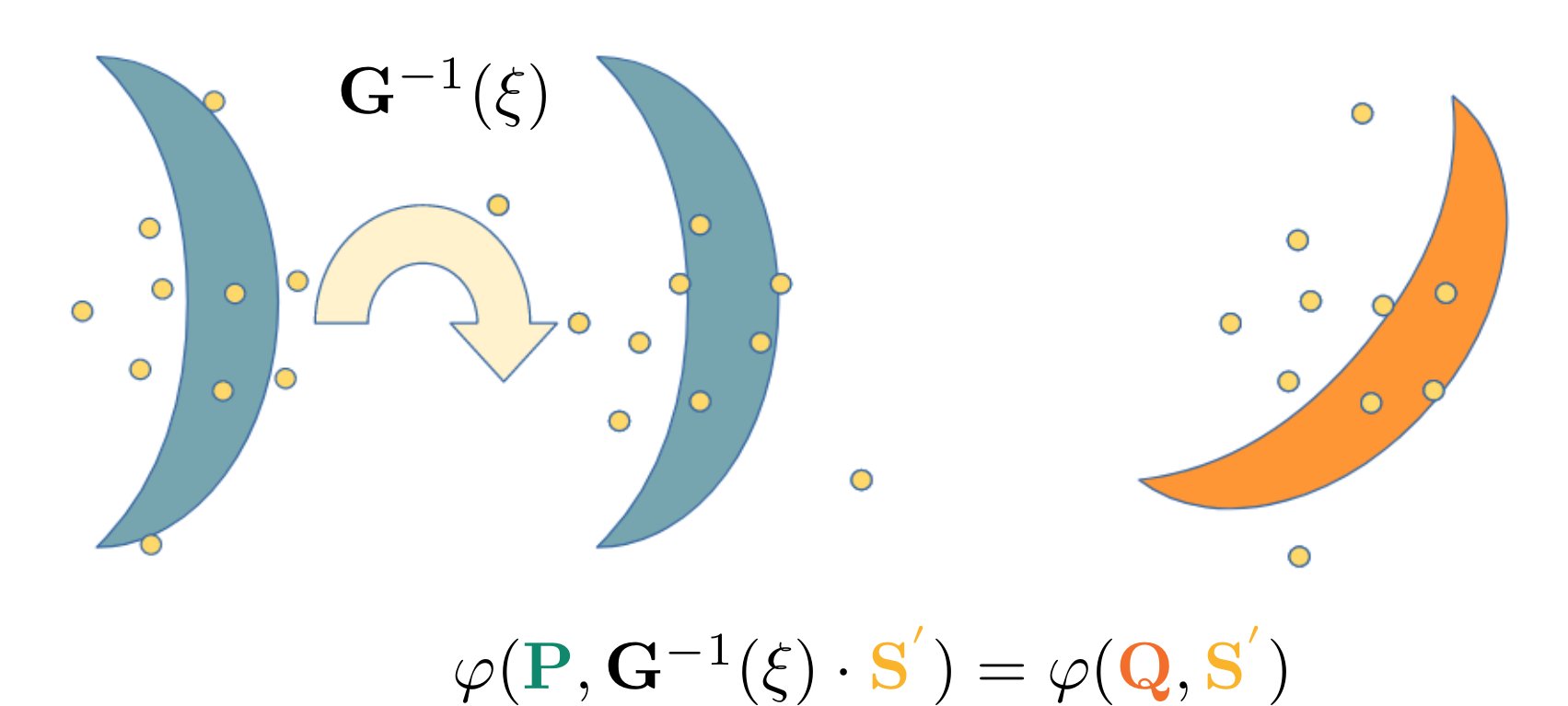
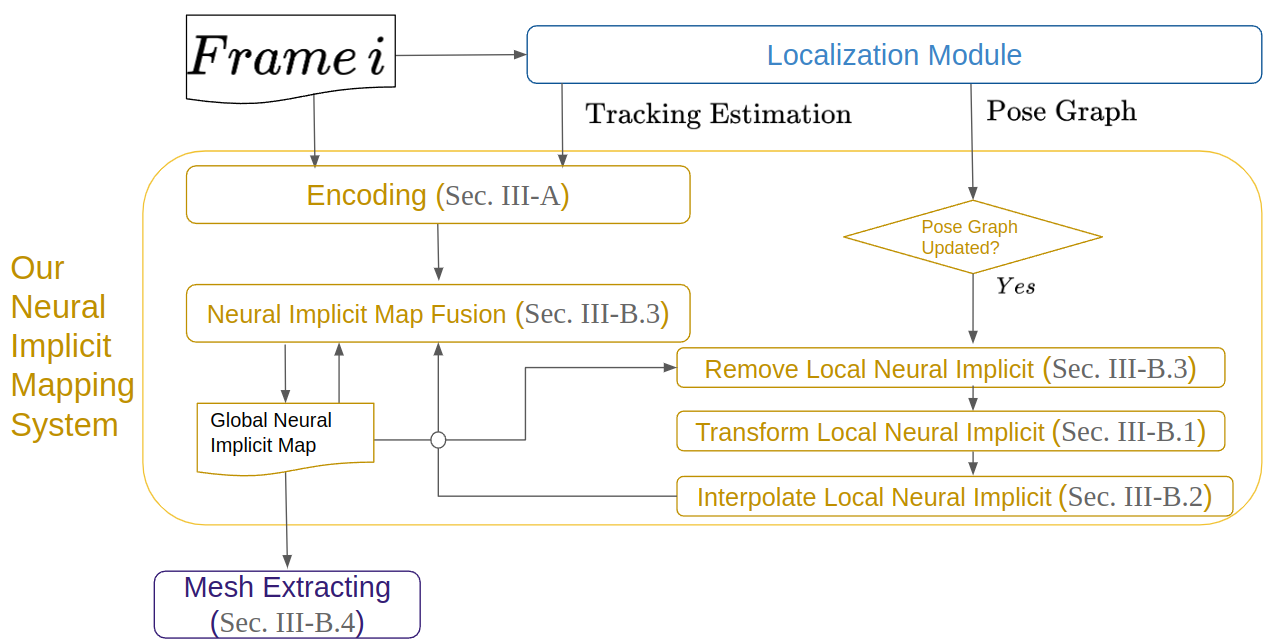 | Yijun Yuan, Andreas Nuchter IEEE Robotics and Automation Letters (RAL), 2022 website | paper | codeSE(3)-transformation on neural-implicit maps and enable remapping function. This is the first algorithm that make neural-implicit based reconstruction compatible with Loop-closure. |
 | Yijun Yuan, Andreas Nuchter IEEE Robotics and Automation Letters (RAL), 2022 paper | codeRegistration two point cloud with a pseudo-third point set. Thus method have potential to work with neural-implicit registration. |
Morepage